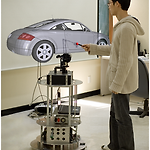
transformation 유도 xlos 연구노트 / Haptics 2007. 3. 21. World frame에서 PHANToM tooltip frame 까지의 trasnformation을 유도해야 하는데.. World coordinate에서 Robot coordinate까지는 transformation이 맞는데, robot coordinate에서 phantom coordinate로 가는 변환이 자꾸 어긋난다. 벌써 며칠 째 삽질인지.. 에휴. 분명 하나 하나 따져보면 다 맞는데, 막상 합쳐서 곱해보면 값이 영~ -_-;transformation 유도가 얼른 끝나야 Jacobian을 유도하고, tool tip에 적용되는 force도 계산해낼텐데.. 과연 5월에 디펜스를 할 수 있을까? 허허.. 공유하기 URL 복사카카오톡 공유페이스북 공유엑스 공유 게시글 관리 구독하기채현님의 블로그 '연구노트 / Haptics' 관련 글 더 보기 망했삼 2007.04.18 더 읽기 최종 transformation 계산 2007.03.28 더 읽기 시스템 구성도 & 데모 동영상 2006.11.24 더 읽기 Force Sensor, Nano17 2006.11.02 더 읽기 댓글